
Navigation menu
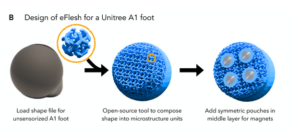 缺乏多功能,易于访问且易于自定义的触觉传感器会导致碎片,这些传感器是整体机器人操作的特定解决方案。纽约大学的研究人员与E-Flesh项目合作提到了这篇文章,该项目弥合了机器人应用程序的无能为力和传感器之间的差距,并注意到了握手,手和脚。有趣的是,您可以轻松地创建自己的传感器:您需要业余3D打印机,小型现成的磁铁和磁力计板。来自E-Fles网站:“传感器由瓷砖组成,这是一个参数切割单元的微观结构,允许调整后的传感器的几何形状和机械响应。为了支持广泛的访问,我们提供了一个开放的资源设计工具,将简单的convex obj/stl文件转换为3D-dd-printable na stl for 3d-printable s s s s s in and s s s in and semit and tem and tem and and and and and and and and and and and and and and and and and and and and and and and and and and and and and and and and and and and and。视觉基线40%在许多准确的活动中,只有90%的成功率,例如插入插件和成功的信用卡,这需要亚毫米模型,而Eflesh STL转换工具中的CAD将提供给公众,以促进访问和鼓励采用。
缺乏多功能,易于访问且易于自定义的触觉传感器会导致碎片,这些传感器是整体机器人操作的特定解决方案。纽约大学的研究人员与E-Flesh项目合作提到了这篇文章,该项目弥合了机器人应用程序的无能为力和传感器之间的差距,并注意到了握手,手和脚。有趣的是,您可以轻松地创建自己的传感器:您需要业余3D打印机,小型现成的磁铁和磁力计板。来自E-Fles网站:“传感器由瓷砖组成,这是一个参数切割单元的微观结构,允许调整后的传感器的几何形状和机械响应。为了支持广泛的访问,我们提供了一个开放的资源设计工具,将简单的convex obj/stl文件转换为3D-dd-printable na stl for 3d-printable s s s s s in and s s s in and semit and tem and tem and and and and and and and and and and and and and and and and and and and and and and and and and and and and and and and and and and and and。视觉基线40%在许多准确的活动中,只有90%的成功率,例如插入插件和成功的信用卡,这需要亚毫米模型,而Eflesh STL转换工具中的CAD将提供给公众,以促进访问和鼓励采用。